


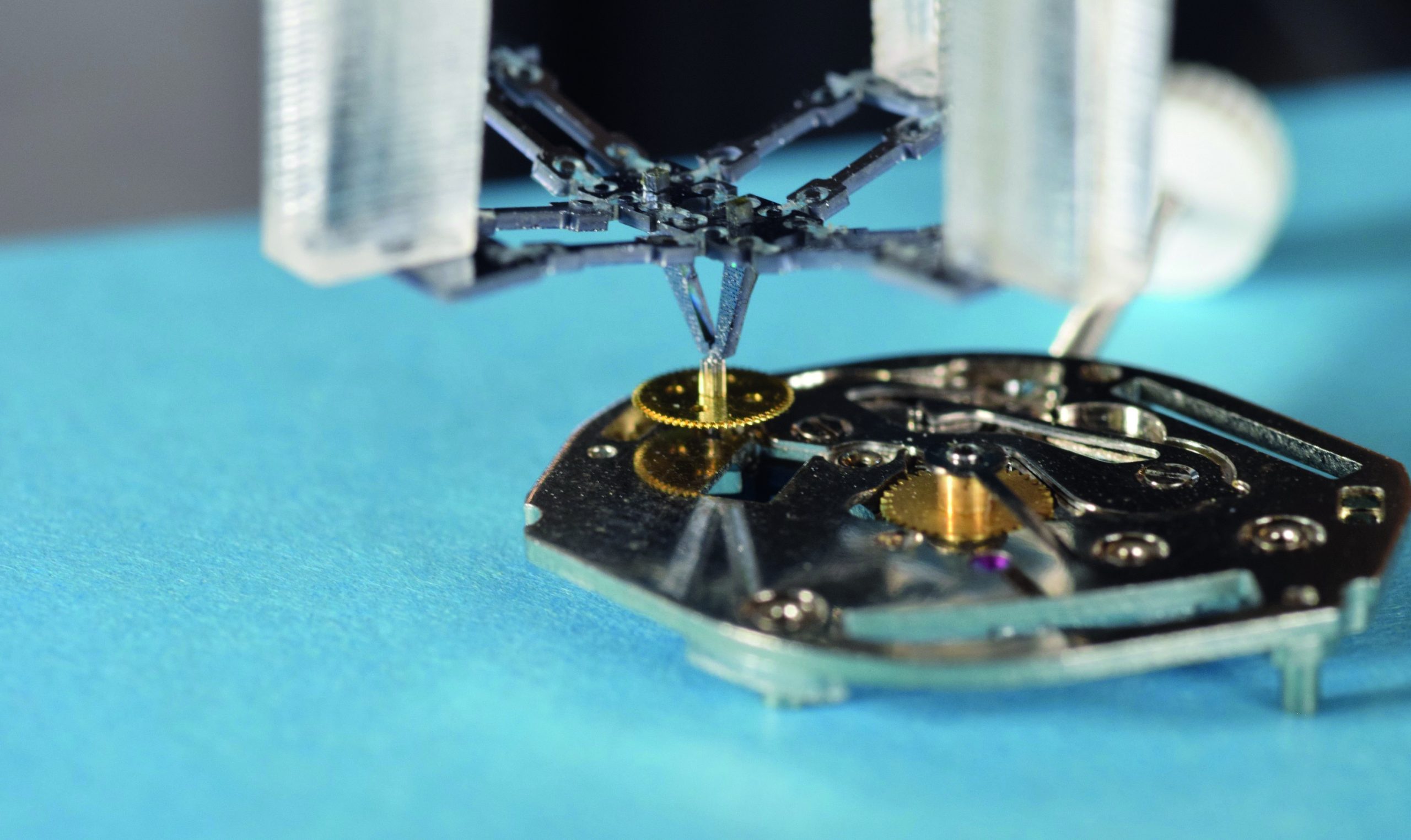
Photo Institut FEMTO-ST
On le présente souvent comme le robot miniature le plus rapide du monde. C’est la vérité, mais ce n’est pas la seule de ses qualités : MiGriBot a été conçu en premier lieu pour saisir et déplacer des microcomposants, selon une technologie jusqu’alors inédite. L’objectif est atteint pour ses inventeurs, qui travaillent désormais à le faire progresser vers l’étape suivante : lui faire assembler ces microcomposants. En attendant, l’équipe menée par Redwan Dahmouche, enseignant-chercheur à l’université de Franche-Comté / Institut FEMTO-ST, a réussi une prouesse extraordinaire, en créant un robot capable de saisir un objet pas même visible à l’œil nu, de le déplacer, puis de le positionner avec une précision de l’ordre du micromètre, soit un millième de millimètre. Cela 12 fois en une seconde, ou 720 fois par minute, ce que ne peut pas non plus saisir notre œil.
C’est une première mondiale : en 2018, des chercheurs de l’université de Harvard avaient mis au point un microrobot aux déplacements rapides, mais sans fonction de saisie, et en 2020, une équipe de l’université de Tokyo avait créé un prototype aux fonctionnalités de prise et dépose, mais à une vitesse dix fois moindre et sur une course dix fois moins longue. MiGriBot est une preuve supplémentaire du savoir-faire des chercheurs du département AS2M, combinant développements en microrobotique et maîtrise des très petites échelles. « MiGriBot est conçu selon une architecture en parallèle, dans laquelle la micropince est, de manière inédite, contrôlée directement par la base du robot », explique Redwan Dahmouche.
Autre innovation, MiGriBot est doté d’une extrémité articulée, grâce à des joints souples en polymère placés entre des éléments rigides en silicium, ce qui permet le pilotage de la micropince en toute autonomie depuis la base. La structure est dirigée par des actionneurs piézoélectriques, eux-mêmes prolongés par des extensions : en se déformant sous l’action d’un champ électrique, les actionneurs entraînent le déplacement des rallonges, ce qui permet d’amplifier le mouvement du robot miniature de 80 µm à 1 mm, selon les objectifs visés. Réussir à manipuler et à assembler des microcomposants signifie pouvoir mettre au point des dispositifs toujours plus petits, et ainsi gagner en encombrement, en matières premières et en énergie.
C’est aussi profiter de propriétés qui sont spécifiques à l’échelle nanométrique : « Aujourd’hui on sait produire des nanocomposants, mais pas forcément les assembler. D’où la nécessité de développer de nouveaux outils, pour fabriquer par exemple des nanocapteurs utiles à la détection de substances toxiques dans l’atmosphère et dans l’eau, ou de cellules cancéreuses très en amont de la maladie ». Les recherches autour de MiGriBot sont menées dans le cadre du projet MiniSoRo, financé par l’Agence nationale de la recherche (ANR) et Grand Besançon métropole. Les résultats déjà obtenus ont été publiés en août dernier dans la revue scientifique Science Robotics et ont fait l’objet d’un dépôt de brevet.
